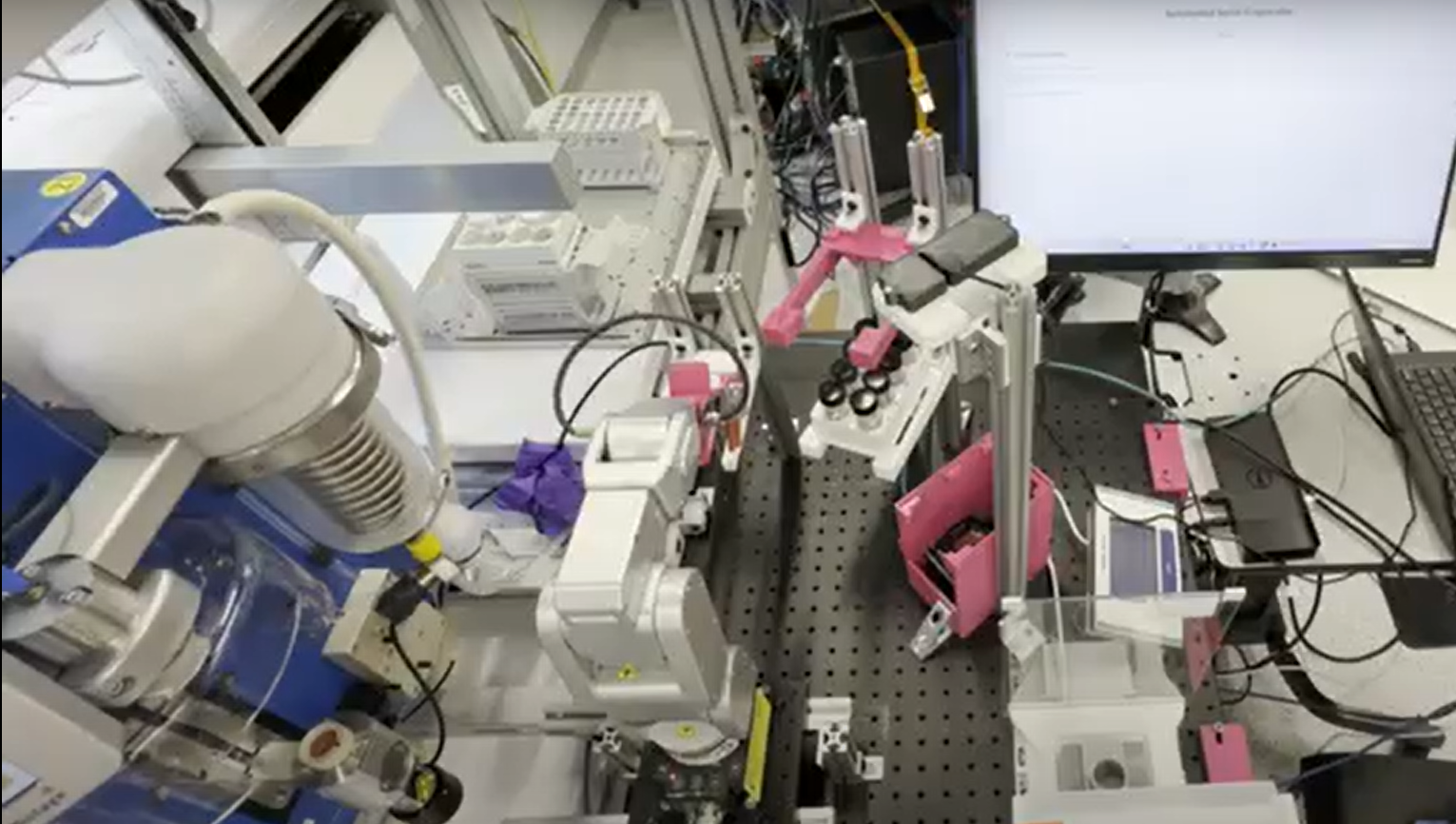
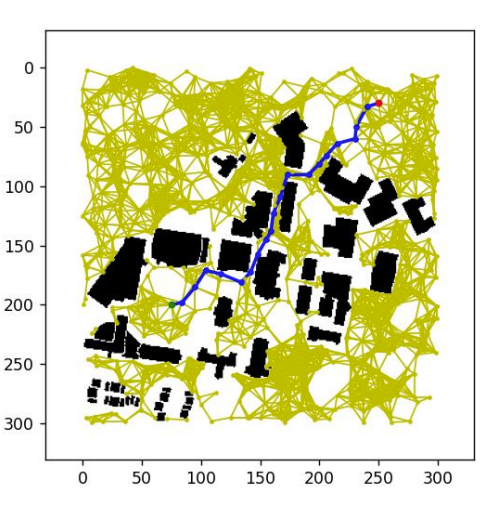
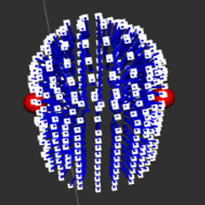
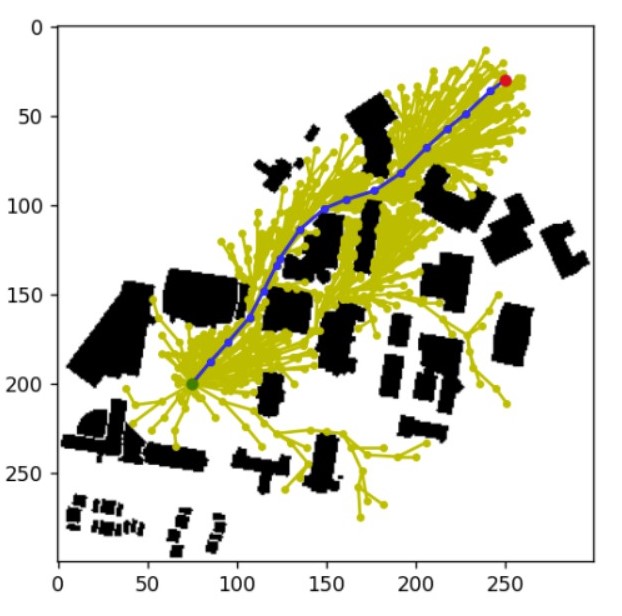
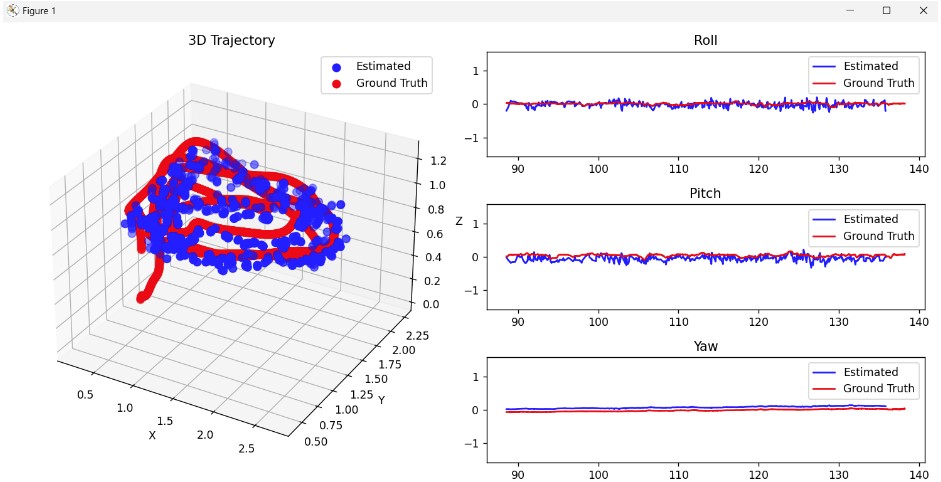
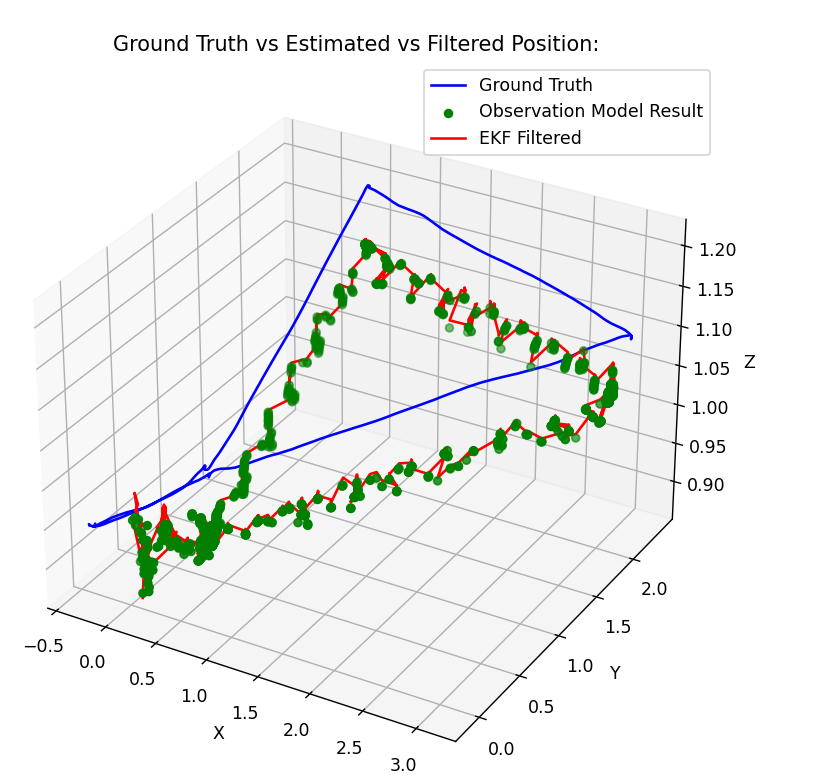
Hands-on Projects Automated Serial Evaporator Development of an Automated Serial Evaporator for Enhanced Laboratory Efficiency at NIH/NCATS Autonomous Mobile Robot for Warehous Industries Developed an AMR prototype with autonomous navigation in indoor environments. Low-Cost LiDAR scanner for Indoor Mapping a prototype of an inexpensive and more flexible design of a 3-Dimensional (3D) LiDAR scanner with the use of a singlepoint ranging LiDAR sensor is presented. The design consists of an electromechanical setup, an optical sensor and a microcontroller for data acquisition (TF-Luna Range Sensor and Arduino Module). Autonomous Mobile Robot for Pick and Place Develop a teleoperated and automonous mobile robot for Indoor pick and place applications. Motion Planning PRM based Motion Planning Implemented Probablisitc Roadmap Algorithm using Random, Uniform, Gaussian, and Bridge-sampling methods. Grasping Assuming Symmetery Used a depth camera to capture real-time 3D representations of the environment, focusing on object symmetries to optimize grasping points. RRT/RRT* and Informed RRT* Motion Planning Implementation of RRT based planning algorithms. State Estimation Extended Kalman & Partical Filters. Drone Trajectory Tracking using Extended Kalman & Partical Filter approach. UKF-based-Quadcopter-Localization A Uncenscted Kalman Filter (UKF) based approach for Quadcopter Localization. Control Design of Quadcopter for UAV catch and return. The proposed project is an implementation of the Linear Quadrotor Regulator (LQR) theory for the control of a quadrotor that spans the given restricted airspace. Moroever, the idea focuses on the capture and retrieval of unknown aerial intruders such as a UAV. Deep Learning DQN and PPO implementation on Breakout Atari Game. Developed and compared the Deep Q-Network and Proximal Policy Optimization algorithm on Breakout Atari Game. Agent Motion Prediction Developed a CNN-RNN based model to predict motion of an agent using Lyft Dataset.